Config
MegFlow 的建图描述文件使用 toml 格式。toml 注重人类可读性,学习难度约等于 markdown,看完下面 2 个例子大约就会写了。
图片范例
举个栗子,cat_finder/image_gpu.toml:
// 完整的计算图的名字,叫啥都行
main = "cat_finder_image"
[[graphs]]
name = "subgraph" // 子图类型,叫啥都行。子图 == 自己写的业务
inputs = [{ name = "inp", cap = 16, ports = ["det:inp"] }] // 子图入口在 det 节点的 inp 端口,队列长度是 16
outputs = [{ name = "out", cap = 16, ports = ["redis_proxy:out"] }] // 子图出口是 redis_proxy 的 out 端口
connections = [ // 构图, A 的输出,连到 B 的输入
{ cap = 16, ports = ["det:out", "reid:inp"] }, // det 输出接到 reid 输入
{ cap = 16, ports = ["reid:out", "redis_proxy:inp"] }, // reid 输出送给 redis_proxy
]
[[graphs.nodes]] // 子图节点声明。注意 4 个空格,表示和 [[graphs]] 的层次关系
name = "det" // 找 examples/xxx/ 下面的 det.py 或者 det package
ty = "Detect" // 这个 node 执行 Detect class
model = "yolox-nano" // 自定义参数,yolox 模型构造需要
conf = 0.25 // yolox 需要的 det 阈值
nms = 0.45 // yolox 需要的 nms 阈值
tsize = 640 // yolox 需要的 inference size
path = "models/yolox_nano.pkl" // yolox 模型相对路径
[[graphs.nodes]] // reid 和 det 同理
name = "reid"
ty = "Reid"
thres = 1300 // 里面用拉普拉斯计算图像清晰度,阈值写的 1300
path = "models/aligned_reid.pkl"
[[graphs.nodes]] // 纯业务逻辑,name 和 ty 字段是必选,其他看需求
name = "redis_proxy"
ty = "RedisProxy"
ip = "127.0.0.1" // redis ip 地址
port = "6379" // redis port
mode = "save" // 控制此节点存特征进 redis
prefix = "feature." // redis key 的前缀,不然整个 redis 库乱乱的
[[graphs]] // 描述完整运行的计算图
name = "cat_finder_image"
connections = [
{ cap = 16, ports = ["source:out", "destination:inp"] }, // source 就是 swagger 这类 service,接收视频或图片用的。收到的数据(图像、视频、extra 字段)送进子图
{ cap = 16, ports = ["source:inp", "destination:out"] } // 子图处理完,把结果发给 http server
]
[[graphs.nodes]] // http server 的配置
name = "source"
ty = "ImageServer" // 这是个图片服务
port = 8081 // 端口号
response = "json" // response Content-Type 用 application/json。不写就是默认 image/jpeg
[[graphs.nodes]] // dest 是自己写的业务子图
name = "destination"
ty = "subgraph" // 子图类型。没事儿改它干啥
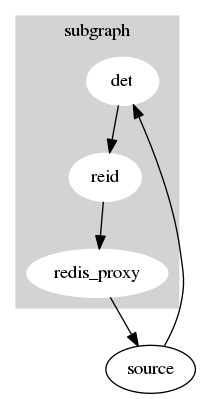
对应可视化的计算图:
视频范例
视频和图片的唯一区别:重资源的节点要在子图之外声明 。
MegFlow 设计上支持不同视频流跑不同业务。每创建 1 路视频就会创建 1 个子图,40 路视频就是 40 个。det/reid 这种很重的节点自然要被复用。
以cat_finder/video_gpu.toml为例:
main = "cat_finder_video" // 完整计算图名字
[[nodes]] // det 节点在子图外声明
name = "det"
ty = "Detect"
model = "yolox-tiny"
conf = 0.25
nms = 0.45
tsize = 640
path = "models/yolox_tiny.pkl"
interval = 5
[[nodes]] // ReID 节点同样在外部声明,被共享
name = "reid_video"
ty = "ReIDVideo"
path = "models/aligned_reid.pkl"
[[nodes]] // redis_proxy 使用了连接池,也可以看作“重资源”
name = "redis_proxy"
ty = "RedisProxy"
ip = "127.0.0.1"
port = "6379"
mode = "search"
prefix = "feature."
[[graphs]]
name = "subgraph"
inputs = [{ name = "inp", cap = 16, ports = ["det:inp"] }]
outputs = [{ name = "out", cap = 16, ports = ["redis_proxy:out"] }]
connections = [ // 描述连接关系
{ cap = 16, ports = ["det:out", "track:inp"] },
{ cap = 16, ports = ["track:out", "shaper:inp"] },
{ cap = 16, ports = ["shaper:out", "reid_video:inp"] },
{ cap = 16, ports = ["reid_video:out", "redis_proxy:inp"] },
]
[[graphs.nodes]] // 给每个检测目标,赋予唯一的 ID
name = "track"
ty = "Track"
[[graphs.nodes]] // 业务逻辑:ID 结束后,给个最优结果
name = "shaper"
ty = "Shaper"
mode = "BEST" // 结果类型,目前只支持 "BEST" 最优
[[graphs]]
name = "cat_finder_video"
connections = [
{ cap = 16, ports = ["source:out", "destination:inp"] },
{ cap = 16, ports = ["source:inp", "destination:out"] }
]
[[graphs.nodes]]
name = "source"
ty = "VideoServer" // 视频服务
port = 8082 // 8081 做注册,8082 做解析
[[graphs.nodes]]
name = "destination"
ty = "subgraph"
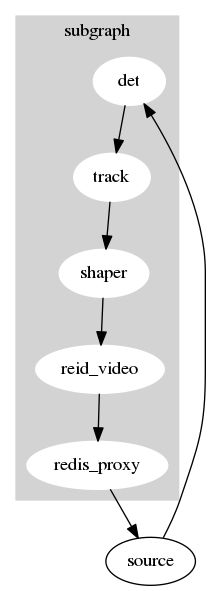
视频解析服务可视化结果和图片接近:
完整定义
TL;DR
严谨的描述文件定义如下:
// 节点间的连接channel
struct Connection {
cap: usize, // channel容量
ports: Vec<String>, // 连接的节点端口,格式是`节点名:端口名[:标签]`
}
// 有名channel
struct NamedConn {
name: String, // channel的名字
cap: usize, // channel容量
ports: Vec<String>, // 连接的节点端口,格式是`节点名:端口名[:标签]`
}
// 节点定义
struct Node {
name: String, // 节点名
ty: String, // 节点类型
cloned: usize, // 表示并行度,默认值为1
res: Vec<String>, // 引用的资源名字列表
... // 其他参数,会被透传到节点的构造函数中
}
// 资源定义
struct Resource {
name: String, // 资源名字
ty: String, // 资源类型
... // 其他参数,会被透传到资源的构造函数中
}
struct Graph {
name: String, // 图的名字
resources: Vec<Resource> // 资源声明, 生命周期与该图绑定
nodes: Vec<Node>, // 节点声明,生命周期与该图绑定
inputs: Vec<NamedConn>, // 图输入声明
outputs: Vec<NamedConn>, // 图输出声明
connections: Vec<Connection>, // 节点间连接声明
}
struct Config {
resources: Vec<Resource> // 全局共享资源, 生命周期与整个应用绑定
nodes: Vec<Node>, // 全局共享节点,生命周期与整个应用绑定
graphs: Vec<Graph>, // 图声明
main: String, // 主图名字,及应用的进入点
}